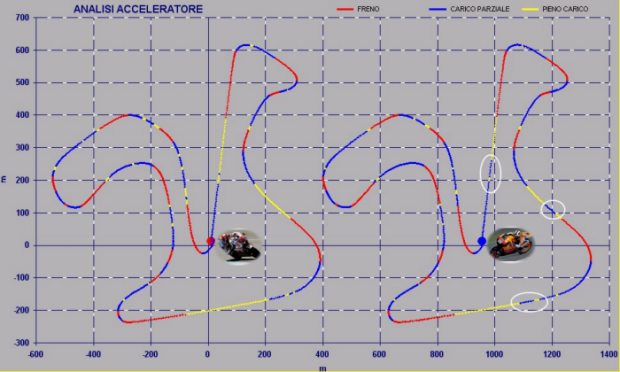
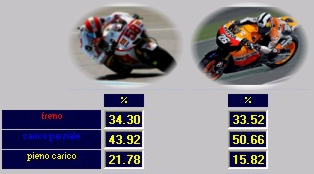
 Il pilota virtuale Pedrosa deve parzializzare
molto di piů (+6.5%) per evitare problemi di trazione e impennamento e questo
richiede una differente gestione del controllo di trazione che se nella realtŕ non
avviene determina una maggiore difficoltŕ di guida e di gestione della gomma
posteriore da parte del pilota reale.
D'altro canto il pilota virtuale
Simoncelli utilizza il motore a pieno carico maggiormente (+6%) pertanto se vi sono
problemi di consumo č certamente penalizzato. |