 |
 |
 |
 |
Abbiamo ipotizzato di prendere una
MotoGP, mantenere fissi la distribuzione dei pesi della
moto, ed i rapporti del cambio e di simulare la
prestazione solo variando peso e altezza del pilota
virtuale.
Come corporature abbiamo preso ad esempio quelle
relative a Simoncelli e Pedrosa e abbiamo simulato la
prestazione sulla pista di Jerez dove si č giŕ corso in
questa stagione. |
 |
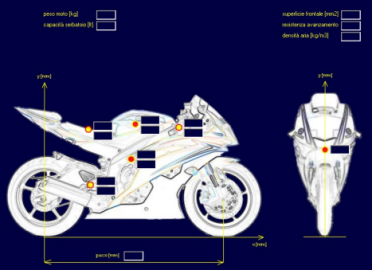
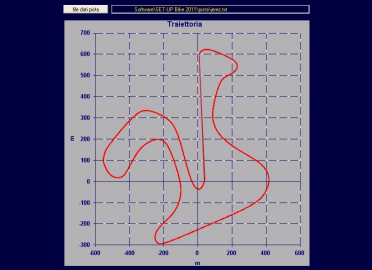
Dopo aver inserito i dati tecnici di
telaio, pneumatici, motore, cambio e scelto come
tracciato la pista di Jerez, abbiamo effettuato la
simulazione dinamica con il nostro software SET-UP BIKE
e confrontato i risultati inserendo le corporature di
Simoncelli e Pedrosa.
Il pilota virtuale č in grado di sfruttare pienamente le
potenzialitŕ della moto gestendo al limite aderenza,
trazione, impennamento in accelerazione e sollevamento
del posteriore in frenata, pertanto la differenza di
prestazione che si riscontra č dovuta esclusivamente
alla diversa corporatura inserita per il pilota. |
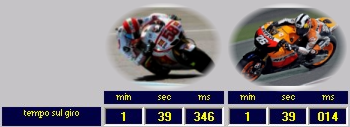 |
Il primo risultato che emerge dalla simulazione č il
tempo sul giro ottenuto dal pilota virtuale con le
caratteristiche fisiche prima di Simoncelli e poi di
Pedrosa. Il confronto parla di un vantaggio di circa 3
decimi a favore di Pedrosa, una differenza leggermente
inferiore a quella che si č vista nelle qualifiche del
gran premio stesso. |
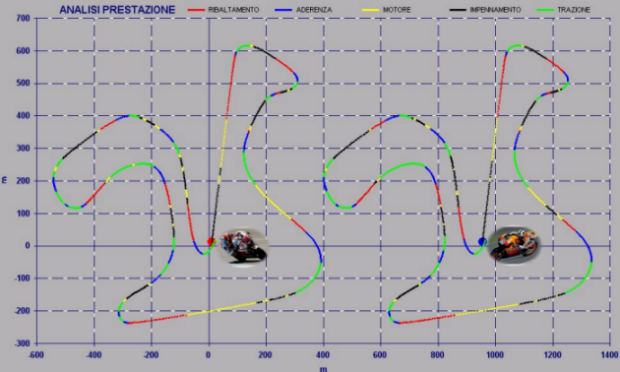
| Da una prima analisi si puň vedere che la
prestazione nel caso di Pedrosa č maggiormente limitata
da problemi di trazione (+4%) e impennamento (+1.5%),
mentre nel caso di Simoncelli si hanno piů difficoltŕ in
fase di frenata (+1%) e soprattutto di motore (+5%). |
 |
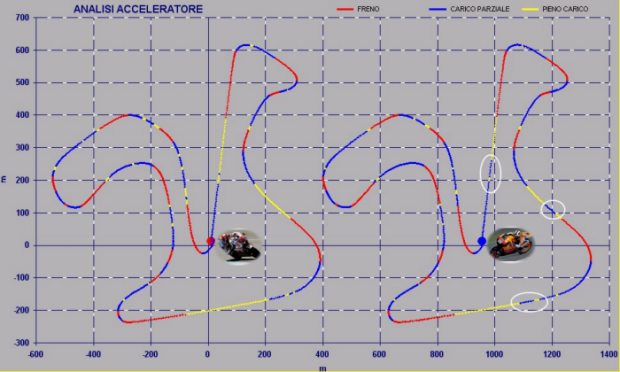
| Ma a prescindere dal tempo sul giro
vogliamo analizzare da cosa dipenda la differenza di
prestazione e come il pilota virtuale ha dovuto
modificare la sua guida per la differente corporatura. |
 |
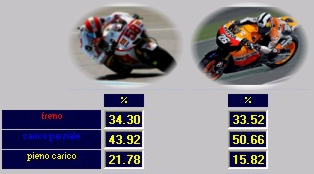 |
Il pilota virtuale Pedrosa deve parzializzare molto
di piů (+6.5%) per evitare problemi di trazione e
impennamento e questo richiede una differente gestione
del controllo di trazione che se nella realtŕ non
avviene determina una maggiore difficoltŕ di guida e di
gestione della gomma posteriore da parte del pilota
reale.
D'altro canto il pilota virtuale Simoncelli utilizza il
motore a pieno carico maggiormente (+6%) pertanto se vi
sono problemi di consumo č certamente penalizzato. |
 |
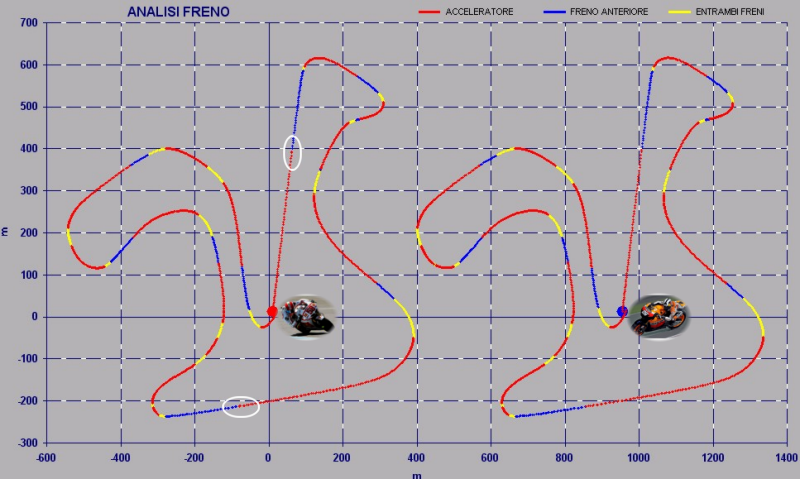
| Entrando nel dettaglio della fase di
frenata si puň vedere che nelle due staccate principali
del circuito un pilota con le caratteristiche fisiche di
Pedrosa potrebbe frenare piů tardi rispetto a
Simoncelli, circa 5 metri dopo sul rettilineo dei box e
addirittura circa 8 metri dopo nell'altro lungo
rettilineo e questo potrebbe risultare un vantaggio per
effettuare sorpassi in gara. |
 |
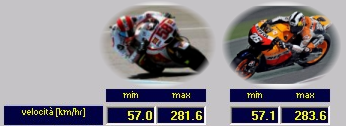 |
In termini di velocitŕ massima la differenza su
questa pista č di 2 km/hr a favore del pilota piů
leggero. |
| Continuando l'analisi tecnica grazie ai
risultati del software SET-UP BIKE si potrebbero fare
ulteriori valutazioni sullo sfruttamento dei pneumatici
o dell'impianto frenante, o sui differenti carichi a cui
sono soggette le sospensioni per effetto della
differente corporatura fisica del pilota, ma giŕ da
quanto si č visto č possibile trarre una considerazione
tecnica significativa. |
| Il pilota di corporatura piů minuta ha
indubbiamente dei vantaggi prestazionali, perň č
altrettanto evidente che ha anche delle difficoltŕ che
rendono lo sfruttamento di questo vantaggio molto labile
ed estremamente legato alla messa a punto di telaio e
controllo di trazione. |